The Michigan Scientific (MSC) High Resolution Wheel Pulse Transducer (WPT) uses an integrated encoder, which is attached to a customer’s wheel using MSC wheel mounting components. It is commonly used for automotive testing and gathering data on wheel speed, vehicle speed, and distance traveled.





Features
- Easy Installation
- Encoder wheel speed sensor
- Up to 5,000 ppr
- IP67 protection
- Circular connectors on stator and rotor
- Sealed, corrosion resistant metal housing
- Lightweight and compact
- NIST traceable calibration
- Used for speed testing, vehicle brake testing, distance measurement, and map validation
Description
The High Resolution Wheel Pulse Transducer Assembly (WPT) is used as rotation sensor mounted outboard of a vehicle wheel. The rotation sensor is used to measure rotational velocity, angular position, and direction of rotation. The assembly consists of electronics in a rugged housing, which is attached to a wheel plate and mounted on the customer wheel using collet lug extensions. The output signals generated by the sensor can be used to determine wheel speed, acceleration, distance, and vehicle speed.
The WPT is very rugged and has been designed to accept contacting rotary seals. Units ordered with these seals are weatherproof with an IP67 rating.
Applications
Like many of Michigan Scientific’s products, the High Resolution Wheel Pulse Transducer instrumentation package is designed to be used on a variety of vehicles in many different testing applications. It is the optimal tool for determining how far a vehicle has traveled, how fast the vehicle or wheels are going, and how fast the vehicle is accelerating. The output signals from the WPT are used for analysis in acceleration and braking tests as well as ABS testing. This is crucial when determining the tractive contact a vehicle has with a surface during vehicle development. These systems are commonly used during autonomous and electric vehicle development and weather testing in standard customer vehicles. Having an accurate measurement of wheel speed and distance traveled is also important for mapping for vehicle GPS and navigation systems. Wheel Pulse Transducers provide reliable measurements to aid in vehicle innovation.
Encoder Options
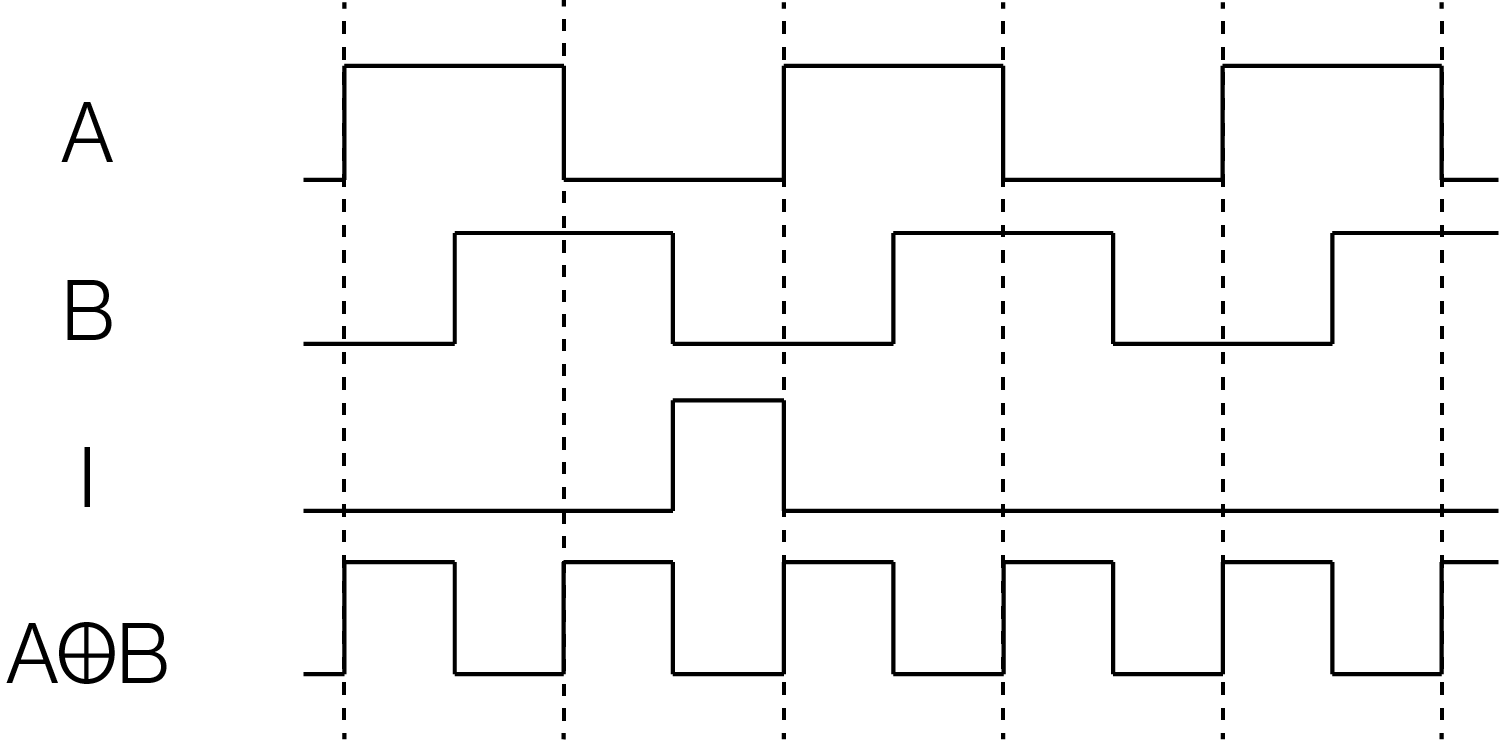
Optical encoder resolutions ranging from 50 to 5,000 are offered. Each of these encoder choices have four outputs. Outputs A and B are in quadrature, meaning they are 90° out of phase. Output I is an index pulse. Output A⊕B is the exclusive OR of A and B, which doubles the basic resolution of the encoder. The outputs, 0 to 5 volt pulses, can drive TTL loads.
See “Signal Conditioning Hardware” tab for more options.
Signal Conditioning Hardware
Michigan Scientific Corporation also manufacturers encoder signal conditioners, which can be used to convert the digital pulses of the WPT sensor encoder to other signal formats. The EC-LV can be added in-line with the stator cable and does not require any additional programming. The EC-LV converts digital pulses to linear voltages.
EC-LV Linear Voltage Conditioner
The EC-LV conditioner converts 0-5 V digital pulses to linear voltages proportional to angular position and angular velocity. The external switches allow the user to select the speed range and direction of rotation. It outputs angular position and velocity signals, in addition to the four encoder signals.

Related Posts
Wheel Pulse Transducer Case Study | Comparing GPS and WPT Data
Using Wheel Pulse Transducers for Autonomous Vehicle Tracking
Converting Wheel Pulse Transducer Outputs to Analog Voltages